



La chaine Youtube Brick Experiment Channel présentait un montage original ce Week End avec un sous-marin radio contrôlé équipé d’une carte Raspberrty Pi Zero 2 W.

Ce montage est assez étonnant, il utilise des Lego pour assurer non seulement la propulsion du système mais également sa direction et sa plongée. Une grosse seringue de cuisine est utilisée pour servir de ballast. La flottabilité quasi nulle du sous-marin est assurée par un chargement d’un poids correspondant au volume d’air embarqué dans sa coque et la seringue, en aspirant de l’eau dans la seringue la flottabilité devient négative. En la repoussant hors du vaisseau, la flottabilité redevient neutre ou positive et le sous-marin change de profondeur. Ce système permet de proposer une gestion très fine de la profondeur à atteindre. Paramètre indispensable pour la suite du projet tout entier.
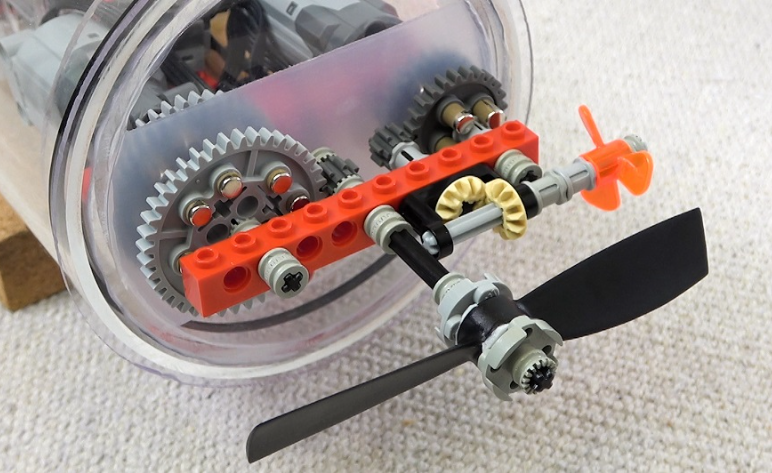
Le reste est plus classique, la coque est un cylindre de matière plastique translucide scellée dans laquelle est enfermée le corps de la machine : Un moteur servira à actionner l’hélice de propulsion et un second moteur fera tourner une plus petite hélice qui dirigera le sous-marin en allant dans un sens ou dans l’autre pour le faire tourner. Détail intéressant, pour éviter toute entrée d’eau dans le vaisseau une fois sous l’eau, la transmission des moteurs est assurée par des engrenages entrainés par des aimants néodymes au travers de la paroi de la coque. Il n’y a pas de trou pour laisser passer l’arbre d’entrainement. Cela aurait été trop dangereux pour les composants internes de laisser un tel risque de fuite avec un objet en rotation au travers d’un joint quelconque. Le fait d’utiliser des aimants assure une bien meilleure étanchéité.

La carte Raspberry Pi zéro 2 W est intégrée au dispositif avec plusieurs usages, elle est en charge de la gestion de la profondeur du sous-marin avec la présence d’un détecteur de pression qui se connecte à 4 broches de la carte pour estimer la pression de l’eau et, par là même, la profondeur du sous-marin. Pour ajouter un peu plus de finesse à ce contrôle, la solution embarque également un laser qui va mesurer la distance avec le fond de l’eau.

C’est une solution retenue parce que, malgré ses désavantages, elle est plus exploitable qu’un système de sonar beaucoup plus complexe. Ainsi un module placé contre la coque transparente du vaisseau peu le traverser et pointer la distance avec le fond. A condition que l’eau ne soit pas trouble, évidemment. Là encore, le module laser est connecté et lu par la carte Raspberry Pi. La détection possible qu’à 50 cm du fond, au delà la lecture des données est impossible.

Ces deux éléments permettent à la carte Raspberry Pi de piloter la seringue qui va assurer le réglage de la flottabilité de l’ensemble automatiquement. On pourra ainsi déterminer une profondeur de voyage à « -10 cm » et la conserver. Mais cela permet surtout de changer la profondeur de l’engin quand le fond se rapproche.

Le reste du sous-marin est contrôlé de manière plus classique avec une simple radio-commande qui va gérer les hélices de propulsion et de direction. Le résultat est étonnant, après un test en piscine, un voyage de 200 mètres dans une rivière est effectué. Une caméra embarquée permet de voir ce que le sous-marin a croisé pendant son périple avec évidemment une prise de vue

Tout le projet est documenté en détail. Les modules de détection retenus, les tâtonnements autour de ceux-ci et le code employé pour piloter la carte Raspberry Pi. Un site web est disponible avec l’ensemble de ces éléments.
| 2,5€ par mois | 5€ par mois | 10€ par mois | Le montant de votre choix |












Les autres version était sympa.
C’est un article complétement bidonné : tout le monde sait qu’il n’y a plus de composants, plus de Raspberry et plus d’eau.
Il doit rester quelques Legos, au mieux.
Excellent article néanmoins.
Bluffant. Rien que d’imaginer le système de gestion de profondeur, la direction, le code, le DIY, etc. et le plus satisfaisant : le parcours en rivière. Un pur instant magique.
Sympa, j’apprécie particulièrement les détails, code, et explications que l’on trouve sur le site.
Bravo et merci à l’auteur.
Concernant les sous marins, il existe depuis une dizaine d’années des planeurs sous marins qui peuvent partir en mission d’exploration autonome pendant plusieurs semaines. Ce qui est rendu possible parce que la propulsion est assurée par simple variation de la flotabilité (positive ou négative). Pas besoin de moteur et d’hélice, d’où une faible consommation d’énergie.
Explications en anglais :
https://youtu.be/mhYVcmT06X0
Merci je ne connaissais pas du tout ce système !
@Luc: Thanx ! je ne connaissais pas plus que Pierre :)