



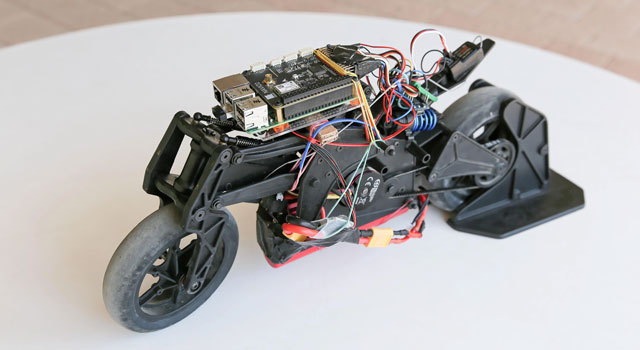
Il y a des batailles de robots un peu partout sur la planète. On met son intelligence au service de la construction d’un robot autonome qui devra détecter et détruire ses adversaires dans une arène. Il pourrait bientôt un nouveau genre de bataille, une course pour être plus exact. Eric Unnervik développe une solution de moto Pi radio commandée qu’il veut pouvoir rendre totalement autonome. Sa particularité ? Elle est pilotée par une carte Raspberry Pi.

La carte permet grâce à des capteurs de garder l’équilibre et de de contrôler la direction de l’engin. Pour le moment il faut la seconder d’un pilotage humain à la télécommande mais à terme le but est de la rendre à 100% autonome.
Avec ce type de dispositif, il serait donc possible de se mettre en piste face à des humains et… tenter de les battre. Une idée séduisante mais qui devra faire face à de nombreux éléments supplémentaires plus durs à prendre en charge que la simple course. L’homme est imprévisible, fourbe et peut faire prendre des risques démesurés à une moto, surtout par télécommande interposée.

Il faudra donc non seulement gérer la course, l’équilibre et les trajectoires de la moto pi, mais éviter les obstacles, les queues de poisson et autres méchancetés qui peuvent être commises sur la piste. Evidemment, il faudra aussi gagner, accélérer suffisamment puisque la moto est capable de grimper jusqu’à 60 Km/h, être régulier et efficace même quand la meilleure trajectoire possible est bouchée par un concurrent. Un challenge de taille qui ne semble pas faire peur à notre étudiant.

Pour ma part, j’aimerais beaucoup une course avec le même principe que les voitures électriques, plusieurs véhicules identiques en ligne et uniquement des programmes différents issus d’équipes de chercheurs pour les différencier. Cela permettrait de voir différentes approches pour terminer une course. Si, en prime, les motos sont équipées de petites cameras judicieusement placées, je serai probablement client du résultat.
Source : epfl.ch
| 2,5€ par mois | 5€ par mois | 10€ par mois | Le montant de votre choix |














[…] https://www.minimachines.net/actu/moto-pi-radio-raspberry-pi-44319 […]
Super projet !
Quand on voit ce que conduire une moto – à fortiori faire la course – demande comme expérience, anticipation et parfois comme chance… je pense qu’on est à des lieux de voir un RPi battre le cerveau humain… Savoir reproduire cela, ce serait pas plutôt du deep-learning ?
Sans compter (et c’est très justement surligné !) la fourberie, privilège de nous les hommes ! Ah ah le jour où les PC deviendront fourbes on sera bien… :D
Mais pour le fun, je serais curieux de voir ce que ça donne à piloter ces joujous la :-)